EVOLUCION DE LOS PROCESADORES DESDE EL INTEL 8086 HASTA EL INTEL PENTIUM III Y AMD K-7.
En este tutorial, que espero que no se os haga muy pesado, vamos a ver un poco la historia de los procesadores y a dar un repaso por lo que estos nos ofrecen en la actualidad.
Hablar de procesadores es, sobre todo, hablar de Intel y de AMD, ya que son las empresas que han soportado el peso del desarrollo de estos, ya sea colaborando ambas empresas como en su fase de desarrollos independientes.
Aunque la historia de los ordenadores comienza bastante antes, la historia de los microprocesadores comienza en el año 1.971, con el desarrollo por parte de Intel del procesador 4004, para facilitar el diseño de una calculadora.
Al mismo tiempo, la empresa Texas Instruments (conocida por el diseño y fabricación de calculadoras) también trabajaba en un proyecto similar, por lo que aun se discute quien fue el creador del primer microprocesador, si Texas Instruments o Intel.
aquí nos vamos a limitar a la época de los PC (Personal Computer), que podemos decir que comienza en el año 1.978, con la salida al mercado del procesador Intel 8086.
Hablando de la historia de los ordenadores personales y sus procesadores no podemos olvidar a Apple y su Macintosh, ni a Motorola y su Power PC, pero en este tutorial nos vamos a centrar en los procesadores que utilizan los juegos de instrucciones x86 y x64 (los actuales procesadores de 64 bits).
8086 y 8088 (de 1.978 a 1.982)

Son los primeros procesadores utilizados en PC.
Muy poco tienen que ver con lo que hoy en día estamos acostumbrados. Ni tan siquiera la forma o el tipo de conexión con la placa base... y sin embargo, como se suele decir en las películas, fueron el principio de todo.
La diferencia entre los 8086 y los 8088 estaba en su frecuencia, que en el caso del 8086 era de unos ''sorprendentes'' 4.77Mhz, pasando en los 8088 a una frecuencia de entre 8 y 10Mhz, pudiendo gestionar 1Mb de memoria.
Usaban un socket de 40 pines (paralelos 20 + 20) y tenían un bus externo de entre 8 y 16 bits.
Carecían de instrucciones de coma flotante, pero para implementar estas se podían complementar con el coprocesador matemático 8087, que era el más utilizado, aunque no el único, ni tan siquiera el que ofrecía un mejor rendimiento.
De los dos modelos, el más utilizado sin duda fue el 8088, que además fue el utilizado por IBM en su IBM PC.
El modelo 8086 aun es utilizado en algunos dispositivos y calculadoras.
80186 y 80188 (de 1.982 hasta nuestros días)
Se trata de una evolución de los modelos 8086 y 8088.
Si bien su uso como procesadores para ordenador tuvo muy poco uso e incidencia, siendo utilizado como tal por tan solo un par de fabricantes de PC, no se puede decir lo mismo sobre su importancia, ya que se siguen utilizando en nuestros días (en su versión CMOS), sobre todo por su capacidad de desarrollar las funciones que de otra forma tendrían que estar distribuidas entre varios circuitos.
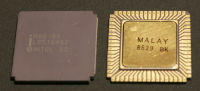
En lugar de socket utilizaban una presentación tipo chip (la misma que utilizan hoy como CMOS), con una frecuencia de 6Mhz.
80286 (de 1.982 a 1.986)


Más conocido como i286 o simplemente como 286, se trata de un procesador en el que ya aparece la forma definitiva que llega hasta hoy (cuadrado, con los pines en una de sus caras), insertado en un socket de 68 pines, si bien también hubo versiones en formato chip de 68 contactos.
Los primeros 80286 tenían una frecuencia de 6 y 8Mhz, llegando con el paso del tiempo a los 25Mhz.
Funcionaban al doble de velocidad por ciclo de reloj que los 8086 y podían direccionar 16Mb de memoria RAM.
Los 80286 fueron desarrollados para poder trabajar en control de procesos en tiempo real y sistemas multiusuario, para lo que se le añadió un modo protegido. En este modo trabajaban las versiones de 16 bits del sistema operativo OS/2. En este modo protegido se permitía el uso de toda la memoria directamente, ofreciéndose además una protección entre aplicaciones para evitar la escritura de datos accidental fuera de la zona de memoria asignada (un sistema en buena parte similar al actual Bit de desactivación de ejecución de datos en su funcionamiento).
Los procesadores 80286 fueron fabricados bajo licencia de Intel por varios fabricantes además de la propia Intel, como AMD, Siemens, Fujitsu y otros.
80386 (de 1.986 hasta 1.994)
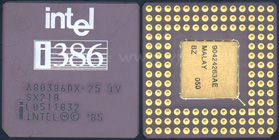

La aparición en el año 1.986 de los procesadores 80386 (más conocido como i386) supuso el mayor avance hasta el momento en el desarrollo de los procesadores, no solo por lo que supusieron de mejora sobre los 80286 en cuanto a rendimiento, sino porque es precisamente con este procesador con el que se sientan las bases de la informática tal como la conocemos. Esto llega hasta el punto de que si no fuera por el rendimiento y frecuencias, cualquier programa actual podría funcionar perfectamente en un 80386 (cosa que no ocurre con los procesadores anteriores).
Se trata del primer procesador para PC con una arquitectura CISC de 32bits e instrucciones x86 de direccionamiento plano (IA32), que básicamente es la misma que se utiliza en nuestros días.
Al tratarse de procesadores de 32bits podían manejar (en teoría) hasta 4Gb de RAM.
Fueron también los primeros procesadores a los que se adaptó un disipador para su refrigeración.
Aclaro lo de ''para PC'' porque Motorola, con su Motorola 68000 para Mac hacia tiempo que ya utilizaba el direccionamiento plano.
La conexión a la placa base en las primeras versiones es mediante socket de 68 pines, igual al de los 80286 pero no compatibles, por lo que también significó el desarrollo de placas base específicas para este procesador, pasando posteriormente a un socket de 132 pines.
Con unas frecuencias de entre 16 y 40Mhz, se fabricaron en varias versiones.
80386 - A la que nos hemos referido hasta el momento.
i386SX - Diseñado como versión económica del 80386. Seguía siendo un procesador de 32bits, pero externamente se comunicaba a 16bits, lo que hacía que fuera a la mitad de la velocidad de un 80386 normal.
i386SX Now - Versión del 80386SX, pero con el patillaje compatible pin a pin con los procesadores 80286, desarrollado por Intel para poder actualizar los 80286 sin necesidad de cambiar de placa base.
i386DX - Es la denominación que se le dio a los 80386 para distinguirlos de los 80386SX cuando estos salieron al mercado.
Este procesador supuso la ruptura de la colaboración de Intel con otros fabricantes de procesadores, lo que tuvo como consecuencia que la gran mayoría de ellos dejaran de fabricar estos.
La gran excepción fue AMD, que en 1.991 sacó al mercado su procesador Am386, totalmente compatible con los i386, lo que terminó con el monopolio de Intel en la fabricación de estos.
Aunque no se utilizan en ordenadores, este procesador sigue en producción por parte de Intel, habiendo anuncio el fin de esta para mediados de 2.007.
80486 (de 1.989 a 1.995)



Más conocidos como i486, es muy similar al i386DX, aunque con notables diferencias.
De este tipo de procesador han habido muchas versiones, tanto de Intel como de otros fabricantes a los que les fue licenciado.
En ocasiones se trataba de procesadores iguales a los de Intel y en otras de diseños propios, como fue el caso de los Am486 de AMD.
Las frecuencias de estos procesadores fueron creciendo con el tiempo, llegando al final de su periodo de venta a los 133Mhz (en el caso del Am486 DX5 133), lo que lo convirtió en uno de los procesadores más rápidos de su época (y hay que tener en cuenta que los Pentium ya estaban en el mercado).
Las más frecuentes fueron 25Mhz, 33Mhz, 40Mhz, 50Mhz (con duplicación del reloj), 66Mhz (con duplicación del reloj), 75Mhz (con triplicación del reloj), 100Mhz (con triplicación del reloj) y en el caso de AMD (en los Am486DX5) 120Mhz y 133Mhz.
En un primer momento también salieron con unas frecuencias de 16Mhz y de 20Mhz, pero estas versiones son muy raras.
Con respecto a los Am486DX5 133 (también conocidos como Am5x86 133), hay que señalar que se trataba del procesador de mayor rendimiento de su época.
Las novedades en estos procesadores i486 fueron muchas, como por ejemplo un conjunto de instrucciones muy optimizado, unidad de coma flotante integrada en el micro (fueron los primeros en no necesitar el coprocesador matemático), una caché integrada en el propio procesador y una interface de bus mejorada. Esto hacia que a igualdad de frecuencia que un i386 los i486 fueran al doble de velocidad.
En cuanto a las versiones de los i486, podemos destacar:
Intel 80486-DX - La versión modelo, con las características indicadas anteriormente.
Intel 80486-SX - Un i486DX con la unidad de coma flotante deshabilitada, para reducir su coste.
Intel 80486-DX2 - Un i486DX que internamente funciona al doble de la velocidad del reloj externo.
Intel 80486-SX2 - Un i486SX que funciona internamente al doble de la velocidad del reloj.
Intel 80486-SL - Un i486DX con una unidad de ahorro de energía.
Intel 80486-SL-NM - Un i486SX con una unidad de ahorro de energía.
Intel 80486-DX4 - Un i486DX2 pero triplicando la velocidad interna.
Intel 80486 OverDrive (486SX, 486SX2, 486DX2 o 486DX4) - variantes de los modelos anteriores, diseñados como procesadores de actualización, que tienen un patillaje o voltaje diferente. Normalmente estaban diseñados para ser empleados en placas base que no soportaban el microprocesador equivalente de forma directa.
Los procesadores i486 utilizaron a lo largo su existencia varios tipos diferentes de socket (para más información sobre los diferentes tipos de socket, consulte el tutorial Tipos de sockets y slots para procesadores), desde el socket 486 (de 168 pines) hasta el socket 2 (de 238 pines), finalizando por el socket 3 (de 237 pines, trabajando a 3.3v o a 5v).
Como ya hemos comentado, estos procesadores (en sus últimas versiones, sobre todo de AMD y de Cyrix) estuvieron durante un tiempo en el mercado junto con los primeros Pentium (desde marzo de 1.993 hasta 1.995, prácticamente hasta la salida del Pentium Pro y en el caso de los AMD hasta 1.996).
Pentium (de 1.993 a 1.997)

Este procesador fue creado para sustituir al i486 en los PC de alto rendimiento, si bien compartió mercado con ellos hasta el año 1.995, siendo precisamente estos su gran rival, ya que tuvieron que pasar algunos años (y versiones del Pentium) para que superara a los i486 DX4 en prestaciones, siendo además mucho más caros.
Los primeros Pentium tenían una frecuencia de entre 60Mhz, 66Mhz, 75Mhz y 133Mhz, y a pesar de las mejoras en su estructura, entre las que destaca su arquitectura escalable, no llegaban a superar a los i486 de Intel que en ese momento había en el mercado, y mucho menos a los Cyrix y Am486 DX4.
Para empeorar esta situación, en 1.994 se descubrió un error de división presentado en la unidad de coma flotante (FPU) de los Pentium.
Los primeros Pentium de 60Mhz y 66Mhz utilizaban el socket 4, de 273 pines y 5v, siendo rápidamente sustituido por el socket 5, de 320 pines y 3.3v, utilizado por los Intel Pentium a partir de 75Mhz y por los AMD 5k86 y los primeros K5 de hasta 100Mhz, que también podían utilizar el socket 7.
En enero de 1.997 salió al mercado una evolución de los Pentium llamada Pentium MMX (Multimedia Extensions), al añadírsele a los Pentium un juego de instrucciones multimedia que agilizaba enormemente el desarrollo de estos, con unas frecuencias de entre 166Mhz y 200Mhz.


Este juego de instrucciones presentaba no obstante un serio inconveniente. Cuando se habilitaba no se podía utilizar el FPU (coma flotante), y al deshabilitarlo se producía una gran pérdida de velocidad.
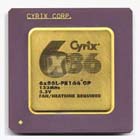
Los Intel Pentium MMX utilizaban los socket 7, de 321 pines y entre 2.5 y 5v. Estos socket son los que también utilizaban los procesadores de la competencia de Intel, tanto los AMD K5 y K6 como los Cyrix 6x86.

Los primeros K5 aparecieron en 1.996. Se trataba de unos procesadores basados en la arquitectura RISC86, más próximos a lo que después serían los Pentium PRO y con un nivel de prestaciones desde un principio muy superior a los Pentium de Intel, pero con una serie de problemas, más de fabricación que del propio procesador, que hicieron que los K5 fueran un fracaso para AMD, y si bien los problemas se solucionaron totalmente con la salida de los K6, Intel supo aprovechar muy bien esta circunstancia para imponerse en el mercado de los procesadores para PC.
Utilizaban para las funciones multimedia las instrucciones MMX, que se habían convertido en el estándar de la época.
En 1.997 salen al mercado los AMD K6.

Diseñados para trabajar en placas base de Pentium dotadas de socket 7 y con unas frecuencia de entre 166 y 300Mhz, tuvieron una pronta aceptación en el mercado, ya que no solo tenían un precio bastante inferior a los Pentium MMX de Intel, sino también unas prestaciones muy superiores a estos y a los Cyrix 6x86, que se quedaron bastante descolgados.
Tal era la velocidad de los K6 que superaban incluso a los Pentium Pro en ejecución de software de 16 bits y solo por debajo del Pentium Pro en ejecución de programas de 32 bits y del Pentium II en ejecución de instrucciones de coma flotante (hay que tener en cuenta que los rivales naturales del AMD K6 NO son ni el Pentium Pro ni el Pentium II, sino los Pentium MMX).
En cuanto al Cyrix 6x86, si bien se trataba de un procesador bastante rápido (más que los MMX de Intel, aunque sin llegar a los K6 de AMD), fue un procesador que desde un principio adoleció de una serie de debilidades e incompatibilidades que hizo que no llegara en ningún momento a ser un serio rival de ninguno de ellos, llegando incluso a poner en peligro la supervivencia de la propia Cyrix, que a finales de 1.997 tuvo que fusionarse con Nationals Semiconductor.
Hay que decir que este es el último socket que tanto Intel como AMD utilizaron conjuntamente, produciéndose con la salida al mercado de los Pentium II el definitivo divorcio entre ambas compañías, hasta el punto de ser incompatibles las placas base para uno u otro.
Pentium Pro (de 1.995 hasta 1.998)

El Pentium PRO no fue diseñado como sustituto de ningún procesador, sino como un procesador para ordenadores de altas prestaciones destinados a estaciones de trabajo y servidores.
Basado en el nuevo núcleo P6, que más tarde seria adoptado por los Pentium II y Pentium III, utilizaba el socket 8, de forma rectangular y 387 pines, desarrollado exclusivamente para este procesador.
Con una frecuencia de reloj de 133 y 200Mhz, incorpora por primera vez un sistema de memoria caché integrada en el mismo encapsulado. Esta cache podía ser de 256Kb, 512Kb o de 1Mb.
Sobresalían en el manejo de instrucciones y software de 32 bits, en máquinas trabajando bajo Windows NT o Unix, pero casi siempre resultaban más lentos que un Pentium (y no digamos que un AMD K6) en programas e instrucciones de 16 bits.
Estos procesadores no llegaron nunca a incorporar instrucciones MMX.
En 1.998 Intel abandonó su producción en favor de una nueva serie de procesadores para servidores y estaciones de trabajo, conocida con el nombre de Intel Xeon, que es la denominación que llega hasta nuestros días para ese tipo de procesadores, tras pasar por denominaciones tales como Intel Pentium II Xeon o Intel Pentium III Xeon.
Pentium II (de comienzos de 1.997 a mediados de 1.999).


A comienzo de 1.997 Intel saca al mercado a bombo y platillo, y con una campaña de propaganda nunca antes vista para el lanzamiento de un procesador, el Pentium II.
Se trata de un procesador basado en la arquitectura x86, con el núcleo P6, que fue utilizado por primera vez en los Pentium Pro.
Con el lanzamiento de este procesador se produce la separación definitiva entre Intel y AMD... y llega la incompatibilidad de placas base entre ambos.
También se produce por parte de Intel el abandono de los socket, en favor de instalar los procesadores en Slot, en este caso Slot 1, de 242 contactos y de entre 1.3 y 3.3 voltios, que por cierto, sería abandonado posteriormente ante los problemas que este sistema genera.
Este sistema se empleó por dos motivos. Uno fué el facilitar la refrigeración del procesador, pero el otro (bastante más real y no confesado) fue la necesidad de espacio (estamos en 1.997, hace diez años, toda una vida en informática) para poder dotar de una serie de características a los Pentium II.
Un tercer motivo fue puramente comercial.
Intel se vio superada tanto en prestaciones como en precio por AMD, lo que le llevo a intentar con el lanzamiento de los Pentium II monopolizar el mercado, ya que la patente del Slot 1 es de su propiedad y no tiene porque licenciarla, por lo que en un principio se convirtió también en el único fabricante de placas base para Pentium II, pero este intento tuvo que ser rápidamente abandonado por razones comerciales, ya que los demás fabricantes de placas base respondieron potenciando la fabricación de placas base para los K6 y K6-2 de AMD y para los Syrix, mejorando incluso las prestaciones del socket 7 con la salida al mercado del socket Súper 7.
Estos procesadores, que como ya hemos dicho estaban basados más en los Pentium Pro que en los Pentium originales, contaban con memoria caché, tanto de nivel L1 (32Kb) como de nivel L2 (512Kb), pero a diferencia de lo que ocurría en los Pentium Pro no estaba integrada en el encapsulado del procesador, sino unida a este por medio de un circuito impreso. Para complicar más el tema, se les dota de instrucciones MMX y se les mejora el rendimiento en ejecuciones de 16bits.
Las frecuencias de reloj de estos Pentium II iban desde los 166Mhz a los 450Mhz, con una velocidad de bus de 66Mhz y de 100Mhz para las versiones superiores a los 333Mhz.
Por primera vez se utilizaron nomenclaturas para definir las diferentes versiones, tales como Klamath y Deschutes o Tonga y Dixon en dispositivos móviles.
Klamath:
A la venta desde mayo de 1.997, con un FSB de 66Mhz y frecuencias de 233Mhz, 266Mhz y 300Mhz.
Deschutes:
Sustituye a la serie Klamath en enero de 1.998.
Se comercializa con dos frecuencias de FSB diferentes y con velocidades de entre 266Mhz y 450Mhz.
- FSB 66Mhz - 266Mhz, 300Mhz y 333Mhz.
- FSB 100Mhz - 350Mhz. 400Mhz y 450Mhz.
También, y en un intento por dominar totalmente el mercado cubriendo el espectro de ordenadores más económicos, Intel introduce en 1.998 la gama Celeron.
En agosto de 1.998 Intel saca al mercado una nueva gama de procesadores económicos, denominados Intel Celeron, denominación que llega hasta nuestros días.
La principal finalidad de esta gama fue y es la de ofrecer procesadores al bajo precio para frenar el avance de AMD.
En esta fecha, Intel lanza el primer Celeron, denominado Covington.
Este procesador no era otra cosa que un Pentiun II a 266 o a 300Mhz, pero sin memoria Caché L2.
Tenían una velocidad superior a los MMX, pero su rendimiento efectivo era bastante pobre, por lo que después de un éxito inicial (basado sobre todo en la fuerza de la marca, más que en las cualidades del producto), Intel se planteó su sustitución.
A primeros de 1.999, Intel saco al mercado el sustituto del Celeron Covington, el Celeron Mendocino.
Aquí sí que Intel hizo bien los deberes, sacando al mercado uno de los mejores procesadores de su época, ofreciendo sobre todo una relación calidad/prestaciones/precio hasta el momento reservada a AMD, ya que si bien los Pentium II tenían unas prestaciones bastante superiores a los AMD, sobre todo en el desempeño de coma flotante, no es menos cierto que su precio era muy superior.

Los primeros Mendocino salieron con una velocidad de 300Mhz, conservando el FSB a 66Mhz, pero incorporando por primera vez en un procesador una memoria caché L2 (en este caso de 128Kb) incorporada en el mismo microprocesador y a la misma velocidad de este, en vez de llevarla exterior, como es el caso de los Pentium II.
Esto hacía que las prestaciones de los Mendocino, sobre todo en velocidades de hasta 433Mhz, fueran realmente buenas, llegando a competir seriamente con sus hermanos mayores, los Pentium II, lo que a la larga se convirtió en un problema para la propia Intel.
En las versiones superiores, debido sobre todo a la limitación que suponía el FSB a 66Mhz, las prestaciones reales no eran tan buenas, dejando de ser un gran procesador para convertirse simplemente en un procesador competitivo, siendo en muchos casos superado ampliamente por los AMD K6-2.
Por su parte , AMD no respondió a la salida de los Intel Pentium II hasta mayo de 1.998, con la salida al mercado del nuevo AMD K6-2.
Este procesador siguió utilizando el socket 7 en las versiones de hasta 550Mhz y el socket Súper7, que permitía el uso de AGP.
El uso de este tipo de socket fue todo un acierto comercial por parte de AMD, ya que permitía actualizar los Pentium que utilizaban este mismo socket a unas prestaciones incluso superiores a las ofrecidas por los Mendocino, e incluso en algunos casos a las ofrecidas por los Pentium II de menores velocidades, pero con un desembolso económico muchísimo menor.
A esto hay que sumarle una serie de mejoras introducidas por AMD, tales como caché L1 incorporada en el microprocesador y un nuevo juego de instrucciones de coma flotante y multimedia exclusivo de AMD, denominada 3DNow!, que ofrecía un rendimiento superior a las instrucciones MMX (si bien es perfectamente compatible con estas), y sobre todo mejorando sustancialmente el problema de no ser posible la utilización de instrucciones de coma flotante cuando se utilizaban las instrucciones MMX.
En general, los Mendocinos eran más rápidos en accesos a caché y tenían un excelente rendimiento en operaciones de coma flotante frente a los K6-2, pero estos tenían una mayor velocidad de acceso a memoria y un mejor desempeño multimedia, debido sobre todo a la utilización de un FSB a 100Mhz y al conjunto de instrucciones 3DNow!, que con las debidas actualizaciones y mejoras sigue utilizando AMD en la actualidad.
La gama de AMD K6-2 iba desde los 233Mhz hasta los 550Mhz, con una caché L1 de 64Kb (32 para instrucciones y 32 para datos, en acceso exclusivo).
Este procesador, de un gran éxito comercial, afianzó las bases de AMD y permitió el posterior desarrollo de los AMD Athlon.
Pentium III (de 1.999 hasta 2.003)
En febrero de 1.999 Intel lanza el sustituto del Pentium II, el Pentium III.
Entre 1.999 y 2.003 se produjeron Pentium III en tres modelos diferentes:
Katmai:

De diseño muy similar al Pentium II, introduce el juego de instrucciones SSE, que ya no implica la deshabilitación de la unidad de coma flotante para poder realizar las funciones multimedia, tal como ocurría con MMX, así como un controlador mejorado de caché.
El Pentium III Katmai utilizaba el mismo Slot 1 que los Pentium II, pero se fabricaron con unos FSB de 100Mhz y de 133Mhz.
En un principio sus frecuencias eran de 450Mhz y 500Mhz, y en mayo de 1.999 salieron al mercado los Katmai de 550Mhz y 600Mhz.
Coppermine:


A finales de 1.999 sale al mercado la versión Coppermine.
Esta versión incluye un aumento de caché L2 hasta los 256Kb.
Esta serie utiliza tanto el Slot 1 como el nuevo Socket 370, introducido en el mercado para estos procesadores.
Incluso existía un adaptador para poder utilizar los Coppermone 370 en slot 1.
Se fabricaron con unas velocidades de 500Khz, 533Mhz, 550Mhz, 600Mhz, 650Mhz, 667Mhz, 700Mhz y 733Mhz.
En el año 2.000 salieron las versiones de 750Mhz, 800Mhz, 850Mhz, 866Mhz, 933Mhz y 1Ghz.
Esta versión no ha muerto, ya que los primeras consolas Xbox lo utilizan en una versión especial de 900Mhz.
Tualatin:

Introducida en el año 2.001, se trata de la última serie de Pentium III, ya desarrollada solo para socket 370, con unas velocidades de 1.13Ghz, 1.2Ghz, 1.26Ghz y 1.4Ghz y un FSB de 133Mhz.
Estos procesadores contaban con 256Kb de caché, y en la versión Pentium III-S (versión para servidores), con 512Kb.
Durante este periodo, Intel también potenció la Gama Celeron, con una serie de mejoras introducidas en este, así como una serie de modelos diferentes:
Celeron Coppermine-128:

En Marzo de 2.000, Intel pone finalmente a la venta los nuevos Celeron Coppermine-128, conocidos también como Celeron II.
Estos procesadores estaban basados en los Pentium III Coppermine, pero con un FSB de 66Mhz y tan solo 128Kb de caché.
Estos Celeron no destacaban precisamente por su rendimiento, que no supuso una gran mejora sobre el Mendocino.
Se fabricaron en velocidades que iban desde los 533Mhz a los 766Mhz.
Para solucionar esta falta de rendimiento, en enero de 2.001 Intel renovó la gama de los Celeron Coppermine-128, aumentando su velocidad de FSB hasta los 100Mhz y ofreciendo unas velocidades de 800Mhz (el primero que se fabricó con un FSB de 100Mhz), 850Mhz, 900Mhz, 950Mhz, 1Ghz y 1.1Ghz.
Esta mejora en el rendimiento los seguía dejando bastante lejos de los Pentium III, pero les permitía defenderse bastante bien frente a los AMD K6-2, a los que superaba en prestaciones.
Nunca fueron unos procesadores que destacaron en nada en concreto, pero debido a su precio eran una buena opción para aquellas maquinas en las que no se necesitara un gran rendimiento.
Celeron Tuatalin:

En 2.002 se introducen los Celeron Tuatalin, basados en los Pentium III del mismo nombre, a los que se les había reducido el FSB a 100Mhz, con la misma caché que los Pentium III, es decir, 256Kb.
Las primeras versiones de este nuevo Celeron tenían una velocidades de 1Ghz y 1.1Ghz, y se les denomina como Celeron A para diferenciarlos de los Celeron Coppermine de esas velocidades.
Posteriormente se sacaron al mercado versiones de 1.2Ghz, 1.3Ghz y 1.4Ghz.
Estos nuevos Celeron no tuvieron un gran éxito, ya que a pesar de las mejoras no alcanzaban un rendimiento destacable, y si bien tenían un buen precio, ya no se tenían que enfrentar a los K6-2, sino a los nuevos AMD Duron, contra los que no tenían nada que hacer.
Todos los nuevos Celeron se fabricaron en socket 370, teniéndose que recurrir a los adaptadores para poderlos montar en placas con slot 1.
Tanto los Pentium III como los Celeron estuvieron unos años junto con los Pentium 4, de los que hablaremos en otro tutorial.
Bien, hasta aquí hemos visto que pasaba en Intel con los Pentium III y los Celeron, pero... ¿qué estaba pasando en este periodo en AMD?.
Pues bien, AMD parecía conformarse con participar (eso sí, con bastante éxito) en el segmento de ordenadores de gama media y baja, con procesadores con un buen rendimiento, pero enfrentados a la gama Celeron de Intel, con unos rendimientos superiores a estos con la gamaAMD K6-2, al menos hasta la salida de los Celeron Coppermine-128.
Pero esto iba a cambiar totalmente en agosto de 1.999 con la salida de los nuevos AMD K7 ATHLON.
La primera serie de Athlon, conocidos también como Athlon Classic salen al mercado en agosto de 1.999, presentando una amplia serie de novedades y luchando no ya contra los Celeron, sino directamente contra los Pentium III de Intel, a los que por cierto superaron ampliamente.
Dadas las peculiaridades de los procesadores AMD, estos no eran compatibles con las prestaciones ni estructura de los chipset de Intel, por lo que AMD colaboró con otras empresas (en especial en esta época con VIA) para el desarrollo de chipset que soportaran las características y rendimientos de los procesadores AMD.
Athlon Classic:

Aunque basado en parte en el K6-2, se le mejora notablemente el rendimiento de coma flotante al incorporar 3 unidades que pueden funcionar simultáneamente, incorporando también las instrucciones 3DNow!. También se eleva la caché L1 a 128Kb (64 para instrucciones y 64 para datos) y se le incorporan 512Kb de caché L2, montados externamente (al igual que los P-II y los P-III de slot 1).
Pero quizás la mayor diferencia la marca la utilización del FSB compatible con el protocolo EV6 de Alpha. Este bus funciona en esta versión a 100Mhz DDR (Dual Data Rate), lo que lo convierte en 200Mhz efectivos.
Esto hace que el rendimiento a igualdad de frecuencia sea muy superior, por lo que no es comparable un Pentium III a 850Mhz con un Athlon a la misma frecuencia.
Se comercializaron en un principio a unas velocidades de entre 500Mhz y 650Mhz, saliendo posteriormente versiones de 750Mhz, 800Mhz, 850Mhz, 900Mhz, 950Mhz y 1Ghz.
La memoria caché trabajaba a la mitad de frecuencia del procesador en los modelos inferiores, a 2/5 en los modelos de entre 750Mhz y 850Mhz y a 1/3 en los de 900mhz, 950mhz y 1Ghz.
los Athlon Classic utilizaban el Slot A, que físicamente era exactamente igual al Slot 1 utilizado por Intel, pero electrónicamente eran incompatibles.
Athlon Thunderbird:
Comercializados a partir de junio de 2.000, la principal diferencia es que abandonan el Slot A para utilizar el denominado Socket A, de 462 pines.
Mantienen el FSB EV6, 128Kb de caché L1 (64 + 64) y 256Mb de caché L2, pero funcionando a la misma frecuencia que el núcleo del procesador.
De esta serie hay dos versiones. Las primeras tenían un FSB de 100Mhz DDR (200Mhz efectivos), y la segunda, comercializada a partir de primeros de 2.001 y denominada Athlon C, con un FSB de 133Mhz DDR (266Mhz efectivos).
Desde su salida al mercado, los Athlon se convirtieron en los procesadores más rápidos del mercado, superando siempre a todas las versiones del Pentium III e incluso a las primeras versiones del Pentium 4, presentando tan solo en inconveniente de unas temperaturas excesivamente elevadas, tema que se solucionó con la salida al mercado del Athlon XP.
Pero AMD no se conformó con esta situación, ya que en la gama baja los procesadores K6-2 habían perdido competitividad frente a los nuevos Celeron Tuatalin.
Para solucionar esto, a mediados de 2.000 AMD saca su nueva gama de procesadores económicos Duron.
AMD Duron:

La primera serie de AMD Duron, denominada Spitfire, sale al mercado a mediados de 2.000 para competir en el mercado de los procesadores económicos con los Intel Celeron, batiendo a estos en prestaciones desde el primer momento.
Esta primera serie no es otra cosa que un Athlon Thunderbird al que se le ha reducido la caché L2 a 64Kb, en lugar de los 256Kb de los Athlon, pero manteniendo el resto de especificaciones, incluido el FSB EV6 de 100Mhz DDR (200Mhz efectivos).
Tenían en esta versión una frecuencia de entre 600Mhz y 1.2Mhz, un extraordinario rendimiento en operaciones de coma flotante y contaban con las instrucciones 3DNow!.
Todo esto los convierte en los procesadores más rápidos en el segmento de procesadores económicos, al igual que sus hermanos los Athlon lo son el el segmento superior.
Esta supremacía en prestaciones la mantendrán durante bastante tiempo, prácticamente hasta la salida al mercado de la última generación de Pentium 4, pero de estos hablaremos en la segunda parte de este tutorial.
En noviembre del año 2.000 Intel saca al mercado el procesador Intel Pentium 4, que estuvieron durante unos años compartiendo mercado con los Pentium III y AMD Athlon y Athlon XP.
En la segunda parte de este tutorial (Modelos de procesadores y su evolución (2ª parte)) hablaremos de las diferentes series de Pentium 4 y Celeron, así como de los procesadores de AMD que compiten en el mercado con ellos.


















